


휴대용 라이다 개발 키트 (모델 : A1)
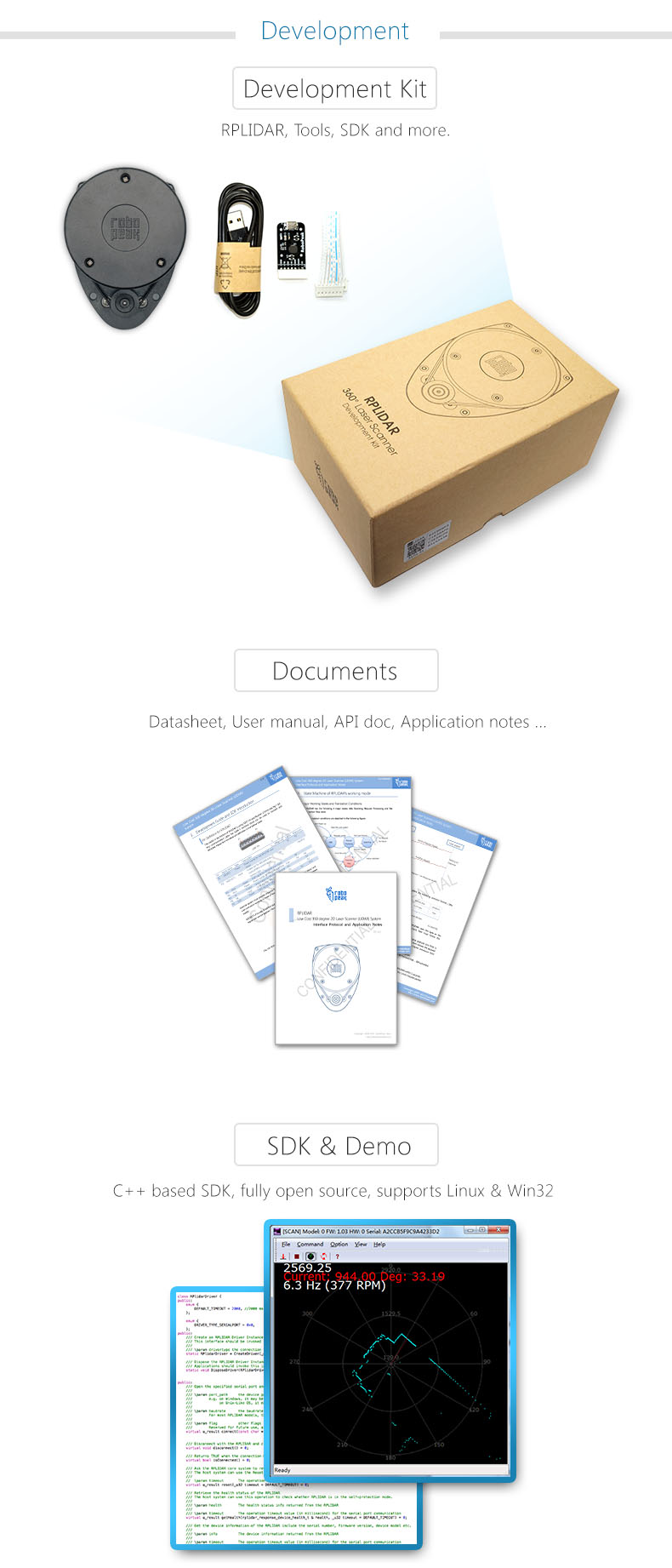
휴대용 라이다 (또는 라이더) 개발 키트
당사는 휴대용 라이다 (Lidar)개발 키트 (모델 : A1)를 제공하고 있습니다.
구매 연락처 : 010-4293-9577, e-mail : nano@nano-i.com (가격 : 300,000 원, 부가세 별도)
- SLAM 가능
- 5.5 Hz (2,000 sample/sec)
- 측정 거리 6 미터
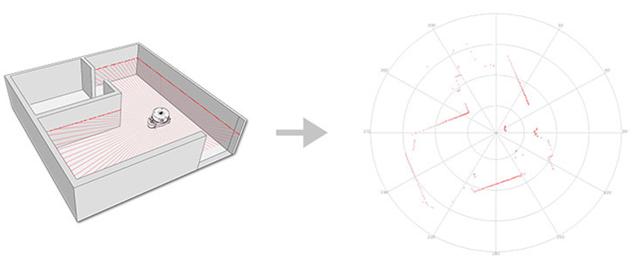
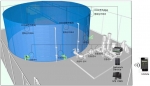
- 360 도 스캔 본 제품은 휴대용 라이다 개발 키트로 저가형 360도 2차원 레이저 스캐너 솔루션입니다. 360 도 범위에서 6 미터 이상의 거리를 감지할 수 있습니다. 생성된 2차원 포인트 클라우드 데이터로 매핑, 위치 추정 (SLAM), 목표물/환경 모델링에 사용됩니다.
기 능 주변
스캐닝 2D 포인트 클라우드 데이터 생성 전 방위 레이저 스캔 사용자 설정 스캔 속도 Scan rate ( 또는 회전 속도) 는 모터의 PWM 신호로 설정됩니다.
로봇 위치 추정 및 매핑의 이상적인 센서 5.5Hz 의 scanning rate 에서 1 도의 각도 분해능
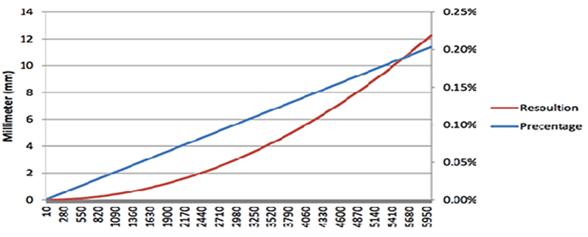
현재 거리 대비 0.2 % 의 정확도
컴퓨터의 USB 에 간단히 연결하여 사용할 수 있습니다. 코딩이 필요 없습니다.
UART/USB 듀얼 인터페이스 오픈 소스의 SDK 와 Tool ROS
기능
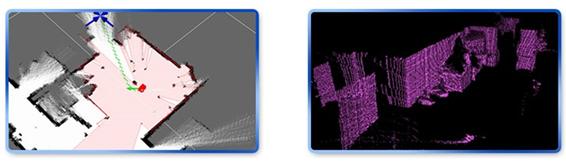
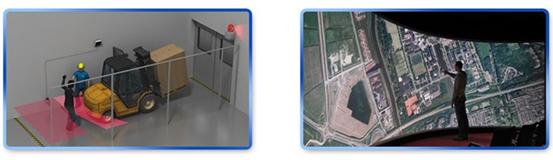
응용 분야 로봇 위치 추적 및 매핑 (SLAM) 3차원 모델링
장애물 회피 (안전 및 보안) 멀티 터치 및 휴먼인터페이스
Best sensors for Robot 장애물 회피, 매핑, 위치 추적, 네비게이션
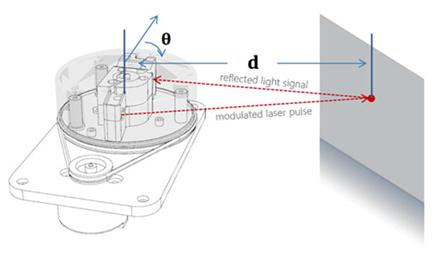
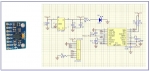
미니 로봇이 라이다를 사용하여 주변 맵을 생성하고 목적지를 찾고 있습니다. 메카니즘 고속 레이저 삼각 측정 비전 시스템 본 제품 라이다는 변조된 적외선 레이저 신호를 발생한 후 탐지될 물체에서 반사됩니다. 반사된 신호는 본 제품 라이다의 비전 획득 시스템에 의해 샘플링되고 라이다 내부에 매립된 DSP는 통신 인터페이스를 통해 물체와 라이다간의 샘플링 데이터, 데이터 출력 거리, 각도 값 처리를 시작합니다.
규 격 1. 측정 성능 항 목 단 위 최소 표 준 최 대 비 고 거리 m TBD 0.2 - 6 TBD 흰색 물체 각도 도 - 0 - 360 - - 거리 분해능 mm - < 0.5 (또는 거리의 1% 이하) - < 1.5 m 일 때 (모든 거리 구간) 각도 분해능 도 - 1 이하 - 스캔 속도 5.5 Hz 일 때 샘플링 간격 ms - 0.5 - 샘플링 주파수 Hz - 2,000 2010 스캔 속도 (scan rate) Hz 1 5.5 10 표준값 (스캔당 300 샘플 측정) 거리별 측정 분해능 2.광학 성능 항 목 단 위 최 소 표 준 최 대 비 고 레이저 파장 nm 775 785 795 적외선 영역 레이저 파워 mW TBD 3 5 peak power 펄스 길이 µm TBD 100 200 3.데이터 포맷 본 제품 라이다는 샘플링 데이터를 계속 출력합니다. 각 샘플 포인트에 대한
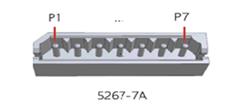
정보는 아래와 같습니다. 4.인터페이스 (개발 키트)
핀 신호명 유 형 내 용 최 소 표 준 최 대 P1 VMOTO Power 라이다의 스캔 모터에 가해주는 파워 - 5V 9V P2 MOTOCTL Input 스캔 모터 / PWM 제어용 0V - VMOTO P3 GND Power 스캔 모터에 가해주는 GND - 0V - P4 V5.0 Power 스캔 코어에 가해주는 파워 3.6V 5V 6V P5 Tx Output 스캔 코어의 시리얼 출력 0V - 5V P6 Rx Input 스캔 코어의 시리얼 입력 0V - 5V P7 GND Power 스캔 코어에 가해주는 GND - 0V V5.0 










데이터 유형
단 위
내 용
Distance (거리)
mm
현재 측정된 값
Heading (헤딩)
degree (도)
현재 측정된 헤딩 각도 (Heading angle)
Quality (품질)
level
측정 품질
Start flag (시작 플래그)
(Boolean)
새로운 스캔에 대한 플래그


-
원격 센서 모니터링 및 현장용 자료 저장 장치
-
스마트 카운터 개발키트
-
수중 초음파 통신 개발키트
-
차세대 IMU 개발 키트
-
360 도 스캔 라이다 개발키트 (확장 거리형, 제품 수명 5년)
-
짐벌락 없는 Yaw Pitch Roll 각도 출력 6축 자이로 센서 개발키트
-
드론의 고도 유지 및 지형 추적 또는 기타 응용의 TOF 방식의 라이다 (Lidar) 개발 키트
-
지자기 센서가 포함된 짐벌락이 없는 9축 자이로 센서 개발키트
-
지구의 자전과 공전이 보정된 짐벌락이 없는 6축 자이로 센서 개발키트
-
투명 마스크 (강의 행사 연예인용)
-
자율주행 미니 로봇 (Robot) 개발 키트
-
저류조 CBM 예측 진단 시스템
-
스스로 사고하는 학습에 의한 인공 지능 영상 분석 솔루션
-
휴대용 라이다 개발 키트 (모델 : A1)
-
수중 초음파 센서 개발 키트
-
휴대용 3D 스캐너 / 3D 프린터 융합 스타터 키트
-
선박 내 또는 주변 영상 센서 통합 관리 시스템
-
6축 가속도/자이로 센서 개발 키트
-
2차원 또는 3차원 레이저 가공용 스캐너 (독일제)
-
스마트폰에 부착하는 현미경 (어플 포함)
















Designed by sketchbooks.co.kr / sketchbook5 board skin
Sketchbook5, 스케치북5
Sketchbook5, 스케치북5
Sketchbook5, 스케치북5
Sketchbook5, 스케치북5

