


농약살포용 자율주행 로봇 개발 (라이다/자이로 센서 응용)
본 제품은 당사가 개발한 농약 살포용 자율주행 로봇으로써, 비닐하우스 등 농약 살포를 하면서 장애물을 회피함과 동시에 정해진 경로로 자율 주행을 할 수 있는 로봇입니다.
레이저를 사용하여 주변의 16m 이내의 거리를 360도 전방위를 스캔하여 주변의 장애물과 벽 등의 위치 정보를 정보를 제공해 주고, 네비게이션 모듈은 9축 자이로 센서가 내장되어 있어서 로봇의 회전 방향 정보를 제공함과 동시에 로봇의 진행 방향을 제어하는 펌웨어가 내장되어 있습니다.
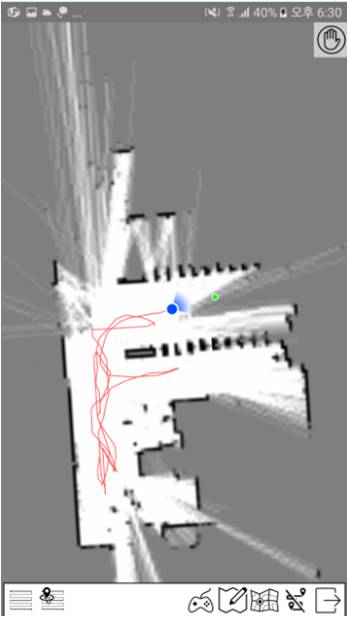
로봇 자율 주행 소프트웨어는 라이다가 정보를 토대로 주변 맵을 형성하는 모드, 로봇의 진행 방향을 설정하여 로봇의 경로 주행할 수 있는 모드, 장애물 회피형 자율 주행 모드 등이다. 이러한 소프트웨어 모듈은 안드로이드 앱으로 작동이 되고, 스마트 폰 등의 와이파이를 통하여 동작이 가능합니다.
연락처 : 010-4293-9577, e-mail : nano@nano-i.com
1. 응용 제품은 당사가 판매하는 있는 360 스캔 라이다 ( 참조 : http://www.nano-i.com/salse/1276239 ) 입니다.
2. 제품 사진 및 기능
가) 제품 사진
로봇의 최상부에 라이다와 로봇 내부에는 네비게이션 모듈이 장착되어 있습니다. 하우스 내를 자율 주행하면서 농약을 자동살포합니다.

나) 제품 기능
아래 사진은 실시간 기능을 설명하고 있습니다. 스마트폰을 사용하여 로봇의 바퀴를 움직여 전후좌우 방향으로 이동하게 할 수 있습니다. 스마트폰을 사용하여 자율 주행 모드로 장애물을 회피하면서 농약을 살포할 수가 있으며, 목적지를 지정하여 장애물을 회피하면서 이동 가능합니다.
|
|

3. 제품 규격은 아래와 같습니다. 라이다는 최대 16m 까지 스캔가능합니다. 네비게니션 모듈은 라이다 스캔 데이터와 9축 지자기 센서 데이터를 사용하여 길을 잃어버리지 않고 경로 맵핑을 하며, 스마트폰의 와이파이를 통하여 통신 및 자율 주행됩니다.
가) 라이다
- 레이저 파장 785 nm
- 360 도 스캔 (각도 분해능 1도)
- scan rate ~15Hz, 4000 samples/sec
- 측정 거리 0.3 - 16 m / 측정 분해능 0.5 mm
나) 네비게이션 모듈
- 입력 파워 9-24 V
라이다 : 경로 맵핑
9축 자이로 센서 (지자기, 가속도, 각속도) : 로봇의 방향 제어
와이파이 (WiFDi AP & STA), LIDAR BUS, High Speed BUS (안드로이드 및 Tablest)
MCU (STM32 F103VET6) 기능 : 모터, 라이다, 9축 자이로 센서 제어
4. Indoor 네비게이션 (어플 연동)
- 측정 거리 16 m ( 직사광 제외 )
로봇 크기 : 외경 1.0 m (1.4 m 까지 지정 가능)
장애물 회피
5. 농약 살포 기능
6. 시스템 파워 24V 30A(최대)
기술 개발
MEMS 설계, nano-MEMS 응용 (3차원 레이저 스캐너, 3차원 레이저 디스플레이, 수중 초음파 센서 및 회로 등) 기술 개발, 지능 영상, 기타 가능한 가용 지식을 적용한 서비스 관련 내용입니다. 계속 업데이트될 예정입니다.
-
read more
드론 기반 리튬 광산 염수 수위 측정 장치
본 제품은 드론 기반 리튬광산 염수 수위 측정 장치입니다. 본 제품은 리튬 광산의 염호(염수 호수) 내 염수 수위를 정확하게 측정하여, 리튬 농축 효율 관리 및 채굴 최적화를 실현하기 위한 드론 기반 리튬광산 염수 수위 측정 장치입니다. 드론 기반...Date2025.04.21 -
read more
자이로 센서 및 오도미터 응용 지하 매설관 내 GPS 좌표 측정 장치
본 제품은 자이로 센서 및 오도미터를 응용하여 지하 매설관 내 GPS 좌표를 측정하는 장치입니다. 본 제품은 자이로 센서 및 오도미터를 응용하여 지하 매설관 내 GPS 좌표를 측정하는 장치입니다. ( 고객 : 강산 기술) 매설관 입구에서 GPS 좌표를 측정...Date2022.09.29 -
read more
고분해능 니켈 금형 및 마이크로 렌즈 어레이
고분해능 니켈 금형 및 마이크로 렌즈 어레이 고분해능 니켈 금형 및 마이크로 렌즈 어레이제작에 대한 내용입니다. 본 제품은 HD 급 이미지 센서 또는 고밀도 라이다 용으로 사용되어지는 마이크로 렌즈 어레이 용 니켈 금형 및 마이크로렌즈 ...Date2022.09.28 -
read more
싱크홀 크기 측정용 3D 레이저 스캐닝 라이다
본 제품은 싱크홀 크기 측정용 3D 레이저 스캐닝 라이다입니다. 최근 도로 등의 지하 공간에서는 싱크 홀 등의 문제로 보수 공사하는 경우가 많이 발생하고 있습니다. 보수 공사하기 위하여서는 시추홀의 크기가 외경 50 mm 이내로 한정되어 있어서 그 비...Date2022.02.09 -
read more
대면적 마이크로 렌즈 어레이용 금형 개발
대면적 마이크로 렌즈 어레이용 금형 개발에 대한 내용입니다. 일반적으로 마이크로렌즈어레이의 단위 렌즈 크기는 수마이크로미터 내지 수백마이크로미터 크기의 직경을 가지나, 당사가 개발한 대면적 마이크로렌즈 어레이용 금형은 렌즈의 크기가 수 mm 정도...Date2022.02.05 -
read more
반구형 마이크로 렌즈 어레이 개발
반구형 마이크로 렌즈 어레이 개발 반구형 마이크로 렌즈 어레이 개발에 대한 내용입니다. 당사가 공개했던 마이크로 렌즈 어레이 (https://www.nano-i.com/webjin_development/1274460) 에 대한 응용 기술 개발에 대한 내용입니다. ...Date2021.03.07 -
read more
MEMS 가속도 센서 개발
MEMS 가속도 센서 개발 정전 구동 MEMS 가속도 센서 ( MEMS Electrostatic actuating acceleration sensor ) 설계에 대한 내용입니다.. 멤스 초창기부터 가속도 센서 개발에 뛰어든 선두 주자들이 현재 전 세계 MEMS 시장을 주도하고 있습니다....Date2021.03.06 -
read more
자이로 GPS 로라 통합 모듈
자이로 GPS 모듈 본 제품은 2018년 4월에 개발하였던 GPS 로라 블루투스 융합의 자이로센서 모듈입니다. 물체의 위치 (GPS 좌표)와 회전각도를 멀리서도 정확히 실시간으로 알 수 있습니다. 제품 또는 응용 기술 개발 문의 연락처 : 010-4293-9577, e-...Date2018.12.31 -
Read More
MEMS 가스 센서 개발
MEMS 가스 센서 MPW 서비스 MEMS 가스 센서 설계에 대한 내용입니다.. 가장 설계 및 제작이 쉬운 멤스 칩이 가스 센서입니다., 예전에는 세주실업이 MEMS 기술로 알코올 센서를 개발하여 경찰청 및 해외에 매출한 사례가 있으며, 최근에는 악취...Date2016.05.23 -
Read More
농약살포용 자율주행 로봇 개발 (라이다/자이로 센서 응용)
농약 살포용 자율 주행 로봇 개발 본 제품은 당사가 개발한 농약 살포용 자율주행 로봇으로써, 비닐하우스 등 농약 살포를 하면서 장애물을 회피함과 동시에 정해진 경로로 자율 주행을 할 수 있는 로봇입니다. 레이저를 사용하여 주변의 16m 이내의 거리를 36...Date2017.12.11 -
Read More
열교환기용 마이크로 채널 개발 (고객 : 동경대학교)
본 제품은 일본 동경대학교의 주문으로 개발한 제품이 되겠습니다. 1. 마이크로 채널 (가공기술 : MEMS) 재질 : 스테인레스 (SUS, 1.5 t) 마이크로 채널 : - 채널 수 : 4 채널 - 750 um x 500 um x 118 mm , 17 개 @ 1 채널 ...Date2015.04.08 -
Read More
고속 3차원 레이저 스캐너 개발
제목 : 마이크로 전기 기계 시스템 응용 고속 3차원 측정용 라이트 엔진 개발 사업명 : 중소기업진흥공단 지원 아이디어 상업화 지원 사업 개발 기간 : 2009.08.01 ~ 2010.05.30 특허명 : 3차원 스캐너용 측정 장치, 특허 등록 번호 : 1011624390000 ...Date2013.10.04 -
Read More
3차원 레이저 디스플레이 개발 (세계 최고급 색재현율)
제목 : TV 급 3차원 레이저 캐릭터 영상 시스템 개발 사업명 : 중소기업기술정보진흥원 지원, 팀 기술개발 지원 사업 개발 기간 : 2011.09.01. ~ 2012.06.30. 양안 시차 적용의 두 개의 프로젝터로 구현되는 848 x 480 어레이의 분해능, 밝기 24 lumen의 R,G,...Date2013.10.06 -
Read More
(40가지 해결 원리 적용) MEMS 구동 거울 개발
1. 종래의 MEMS 구동 거울 Nippon signal Fraunhofer Institute Mirrorcle Tech. 2. 기술적 모순 : 레이저가 거울 표면에서 반사되기 위하여 경사 각도로 입사 시, 거울 ...Date2013.10.03 -
Read More
수중 초음파 센서 및 회로
수중 초음파 센서 및 회로 : 응용 분야 - 강, 호수 등의 깊이 측정 공동 개발 : 중앙대학교 1) 수중 초음파 센서 2) 초음파 발진 및 수신 회로 개발 (Firmware 포함)Date2013.10.04 -
Read More
(실험 계획법 적용) 적외선 센서를 응용한 터치 스위치 또는 패널 개발을 위한 최적 조...
본 건은 장갑을 끼고도 터치할 수 있는 스위치 센서를 개발하기 위한 인터페이스를 개발하는데 있어서 햇빛 조명 등 외부 환경 요인에 대하여 가장 최적의 터치 조건을 실험 계획법으로 나노아이사가 고객의 요청으로 개발한 사례이다. 본 건은 장갑을 끼...Date2014.03.02 -
Read More
(이상해결책) 적외선 센서를 응용한 터치 스위치 또는 패널 개발
본 건은 실험계획법으로 개발한 조건에 대하여 현재의 문제점을 분석하고, 이상해결책을 창의적으로 도출하는 방법을 간단하게 제시한 예입니다. 자세한 절차나 방법에 대한 문의는 아래 연락처로 연락 부탁드립니다. e-mail : nano@nano-i.com 연락처 : 010...Date2014.03.09 -
Read More
고출력용 마이크로 렌즈 어레이 (설계 단계의 성능 검증)
고출력용 마이크로 렌즈 어레이 (Micro lens array for high power) 고출력용 마이크로 렌즈 어레이 개발 일반 마이크로 렌즈 어레이 (Micro lens array) 는 보통 폴리머를 사용하였으나, 당사는 고출력용으로는 쿼츠 재질의 마이크로 렌즈 어레이...Date2014.04.28
Designed by sketchbooks.co.kr / sketchbook5 board skin
Sketchbook5, 스케치북5
Sketchbook5, 스케치북5
Sketchbook5, 스케치북5
Sketchbook5, 스케치북5

