


원자힘 현미경 의 개요 (AFM)
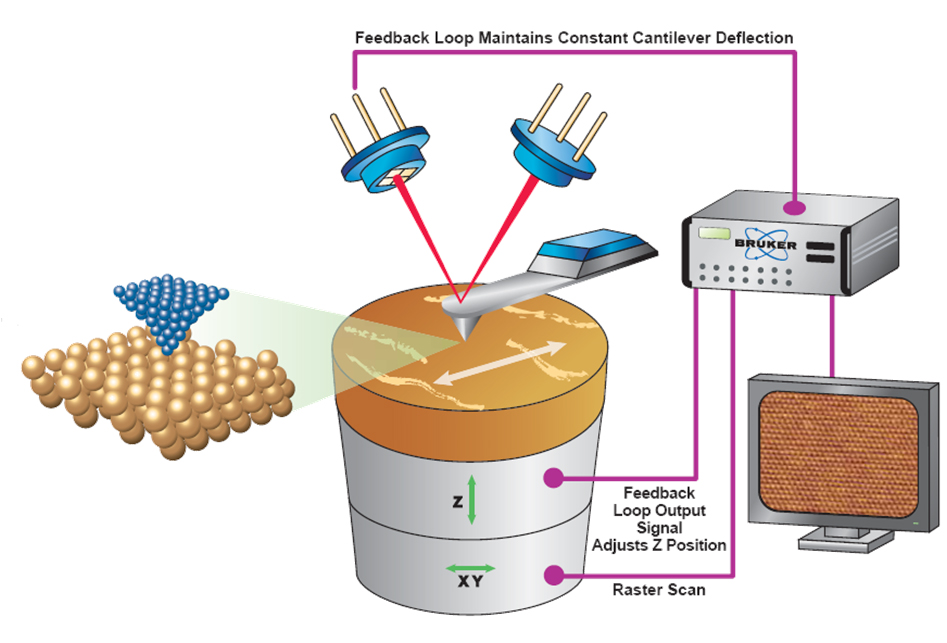
원자힘 현미경 혹은 원자간력 현미경 (原子間力顯微鏡, Atomic Force Microscope, AFM)은 나노미터 스케일, 즉 광학적인 회절 한계 보다 1000 배 이상의 좋은 분해능을 갖는 매우 정밀한 주사 프로브 현미경 (Scanning Probe Microscope, SPM)의 한 종류이다. 미세 탐침을 시료에 근접시켜 시료와 탐침 끝 사이의 미세한 원자간 미세한 상호 작용을 이용하여 표면 형상을 비롯한 다양한 특성을 측정할 수 있는 장치이다.
AFM 은 1986 년 IBM 사의 과학자들에 의하여 발명되었다. AFM 의 효시인 주사터널현미경( scanning tunneling microscope, STM) 이 IBM 사의 과학자인 Gerd Binning 과 Heinrich Rohrer 가 1980 년초에 개발되었으며 이것으로 1986년에 노벨상을 받았다. 비니히(Binning) 는 또한 1986년 스탠포드 대학의 퀘이트(Quate), 거버(Gerber) 와 함께 세계 최초의 실험적 개발을 시도하여 AFM 을 개발하였다. 세계 최초의 상업적인 AFM 장비는 1989 년 도입되었다.
원자힘 현미경은 캔릴레버(cantilever)라고 불리우는
작은 막대 (100μm x 10μm x 1μm) 끝에 달려 있는 탐침으로 시료 표면에 근접시켜 스캐닝하면서 그 표면에 대한 나노미터 크기의
삼차원 형상이나 여러가지 미세한 물리적 특성을 측정하는데 쓰인다. 캔틸레버는 통상 실리콘(silicon) 또는
질화 실리콘 (Silicon Nitride) 로 이루어져 있으며 그 끝 (탐침)의 곡률 반경도 수나노미터 크기이다.
탐침이 시료의 표면에 근접될 때, 팀과 샘플간에 발생한 힘은 후크 (Hooke) 의 법칙에 의하여 캔틸레버를 휘게
한다.
원자힘 현미경에 의하여 측정되는 힘은 기계적인
접촉힘, 반 데르 발스 힘 (Van der Waals force), 표면
장력 (capllary force), 화학적 본딩 (chemical
bonding), 정전기력(electrostatc force), 자기력 (magnetic force), 카시미르 힘 (Casimir force), 용매화 힘 (solvation force) 등등이다. 추가적으로 열적 성질과 같은 물리량도 즉석에서 측정할 수가 있다.
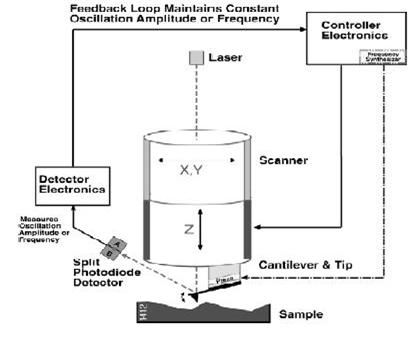
보통 탐침 끝의 변형량은 탐침 끝에서 반사된 레이저
스팟 (laser spot) 이 포토다이오드 어레이로 입사될 때 측정된다. 그
외에, 광학 간섭, 정전 용량 센싱
(capacitive sensing) 또는 압저항 캔틸레버 에 의한 방법 등이 있다.이러한 캔틸레버는
스트레인 게이지 (strain guage)로 작용되는 압저항(piezoresistive)
재료로 만들어진다. 휘스토운 브리지 (Wheatstone
bridge)방법으로 변형으로 인한 AFM 캔틸레버의 스트레인을 측정할 수 있지만, 레이저나 간섭계 보다는 정확하지는 못하다.
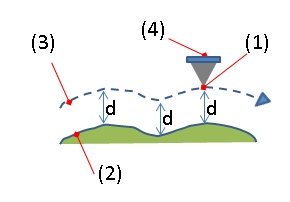
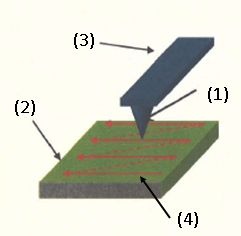
원자힘 현미경 (AFM) 의 화상 형성 방법 화상 형성은 스캐닝하여 팁의 x-y 위치가 변화할 때, x-y 좌표에서의 특정값 (측정된 변수/ 제어신호 세기) 을 색상 맵핑하여 얻어진다. AFM을 사용하는 화상 형성 방법은 z-피드백 루프를 사용하는 방법과 기타 방법으로 크게 분류된다. 전자는 지형 화상 형성 모드 ("Topographic Image Formation Mode") 라고 부르며, 후자는 상수 높이 모드 ( "Constant Height Mode" ) 라고 부른다. 지형 화상 형성 모드에서, Z-피드백 루프는 일반적으로 주파수, 캔틸레버의 움직임에 대응하는 진동 및 위상을 일정하게 유지하도록 하는 출력 제어 신호를 통해 탐침과 시료 사이의 상대적 거리를 제어한다. 예를 들어, 전압이 압전 소자 Z에 인가되면 Z 방향 즉 상하로 샘플이 이동된다. 왼쪽 그림 : AFM 의 X-Y 스캔, (1): 팁 또는 탐침, (2): 샘플, (3): 캔틸레버(Cantilever), (4):X-Y 팀 선단에 대한 궤적. 오른쪽 그림 : AFM 으로 형성되는 토포그래픽 이미지 형성의 개요도, (1): 팁 선단(apex), (2): 샘플 표면, (3): 팁 선단의 Z-궤적(Orbit),(4): 캔틸레버
상수 높이 (constant height) 모드에서, 탐침과 시료간의 사이의 거리가 제어되지 않고, 프로브 x-y 좌표가 스캐닝될 때 변화된다. 따라서, 시료 스테이지와 탐침 (tip) 선단 사이의 거리가 일정하게 된다. 이 거리를 "높이" 라고 칭한다. 그러므로 스캔할 때마다 샘플 표면의 기복에 따라써 탐침과 샘플간의 거리가 변화된다. 각 x-y 좌표에서의 탐침 선단과 샘플간의 변화된 거리가 계산 측정 (측정된 주파수, 진동 진폭, 위상 등에서 계산됨) 되어 색상 매핑된다. 탐침이 시표 표면의 일정한 높이에서 스캔될 때, 팁과 표면과의 충돌으로 인하여 손상이 일어날 수 있다. 그러므로, 대부분의 경우 피드백 메카니즘 (feedback mechanism)이 적용되어
탐침과 시표 표면간 거리를 조정하여 탐침과 시료 표면간에 일정한 힘이 유지되게 한다. 통상 탐침 또는 시료는 x,y,z 세 방향으로 스캐닝되는 3축의 압전 크리스탈로 된 삼각대 (tripod) 위에 마운트된다. AFM 이 발명된 해인 1986년, 새로운 압전 스캐너인 튜브 스캐너가 주사터널현미경(STM) 에 사용되기 위하여 개발되었다. 이 튜브 스캐너의 한 개로 된 압전
튜브 (하나의 내부 전기 접점과 4 개의 외부 접점으로 구성됨.) 는 시료를 x,y,z 방향으로 움직이게 하였다.
튜브 스캐너의 장점은 높은 공진 주파수를 갖는 단일 결정체로 된 캔틸레버에 비하여 상대적으로 낮은 공진 주파수를 가진 고립된 스테이지에
대한 좋은 진동 절연 (vibration isolation) 효과에 있다. 단점으로는, 단일 원통의 휨에 의한 x-y 운동이 z 방향의
운동을 초래하게 되어 왜곡이 발생하는 것이다.
AFM 은 응용에 따라서 여러가지 모드로 작동된다. 그 모드는 크게 두가지로 나뉘는데, 일반적으로, 가능한
이미징 모드는 정적 모드 (static mode) 와 캔틸레버가 주어진 주파수로 진동하는 여러가지 동적 모드 (dynamic mode : 비접촉 또는 태핑, tapping) 두 가지이다.
1. 이미징 모드
(Imaging mode)
AFM 의 작동은 탐침의 운동하는 본성에 따라 보통 다음
세가지 모드 중 하나로 표현된다.
가. 접촉 모드 (Contact mode)
접촉 모드에서는, 탐침은 샘플의 표면을 가로 질러 드래그되어 캔틸레버의 편향으로 인한 표면의 윤곽에 대한 직접적인 측정 또는 캔틸레버의
일정한 위치를 유지하는데 필요한 피드백 신호로 측정된다.
정적 신호의
측정은 노이즈가 발생하고 드리프트하는 경향이 있기 때문에, 낮은 강성률을 갖는 캔틸레버 (예, 낮은 스프링 상수 K 를 갖는 캔틸레버) 는 편향 신호를 증폭하는 데 사용된다. 탐침을 시료의 표면에 근접시키게 되면, 인력은 최대가 되고, 탐침으로 하여금 샘플 표면에 부착되도록 한다. 따라서, 접촉 모드 AFM은 거의 대부븐
전체 힘이 반발되는 깊이에서 수행되나, 어떤 흡착층 아래의 고체 표면에서 탐침과 시료 표면이 서로 접촉됨을
의미한다.
나 태핑 모드
(Tapping mode)
일반 대기 조건에서,
대부분의 샘플은 그 표면에 액체 메니스커스 층을 유발한다. 이러한 원인으로, 탐침을 샘플 표면에 충분이 가까이 유지하는 것은 시료 표면에 탐침이 달라붙는 스티킹 (sticking) 현상을 일으키케 하는데, 일반 대기 조건에서의
이러한 현상을 방지하면서 비접촉 동적 모드에서 근거리 힘으로 측정해야 하는 문제가 발생된다. 동적 접촉 모드 (또한, AC 모드 또는 탭핑 모드 간헐적인 접촉 모드라고도 함) 는 이러한
문제를 우회하기 위해 개발되었다.
태핑 모드에서, 캔틸레버는
비접촉 모드와 유사하게 AFM 팁 홀더에 장착된 작은 압전 소자에 의해 공진 주파수 또는 그 근처에서
상하로 진동하도록 구동된다. 그러나, 진동하는 진폭은 일반적으로
10nm 이상인 100 내지 200nm 이다. 탐침이 시료 표면에 근접 할 때 캔틸레버에 작용하는 힘, 반 데르 발스 힘, 쌍극자 - 쌍극자 상호 작용, 정전기력 등으로 인하여, 탐침이 시료에 가까워 질수록 진동의 진폭이 감소되는 원인이 된다. 전자 서보 장치는 압전 액츄에이터를 사용하여 상기 샘플 표면에서의 캔틸레버의 높이가 제어된다. 서보 장치는 캔틸레버가 샘플 표면을 스캔할 때 그 진동 진폭이 유지되도록 캔틸레버의 높이를 조절하게 된다. 이렇게 하여 탭핑 모드의 AFM 화상은 시료 표면과 탐침간의 간헐 접촉력 (force of the intermettent contacts) 을 이미지화함으로써 얻어진다.
"태핑" 방법은 접촉 모드에 비하여 샘플 표면과 탐침의 손상을 줄이게 된다. 또한, 접촉 모드에 비하여 태핑 모드에서는 탐침 (tip) - 샘플 상호 작용으로 인한 중대한 횡력이 감소된다. 태핑 모드는 부드러워서 지원 지질 이중층 또는 흡착 단일 폴리머 분자 (예를 들어, 0.4 nm 두께의 합성 고분자 전해질 체인) 을 시각화하는데 충분하다
태핑 모드에서 기록된 수용성 매질 속의 단위 폴리머 체인 (서로 다른 PH 특성을 가진 영역의 특성을 나타내고 있음) 다. 비접촉 모드 (Non-Contact Mode) 비접촉 모드에서는, 캔틸레버에 달린 탐침은 샘플 표면에 접촉되지는 않는다. 대신 캔틸레버는 공진주파수 진동 (주파수 변조, frequency modulaton ), 하거나 그 이상의 주파수 (진폭 변조 : amplitude modulation, 진동 진폭이 수 나노미터에서 수 피코미터 사이에서 진동함) 에서 진동한다. 샘플 표면에서부터 1nm 내지 10nm 사이에서 매우 강한 힘을 갖는 반 데르 발스 힘 또는 샘플 표면에서 다소 상당한 거리에서 작용하는 원거리력 (long range force) 은 캔틸레버의 공진 주파수를 감소시키는 작용을 한다. 이러한 공진 주파수의 감소는 피드백 루프 시스템과 결합하여 탐침과 샘플간 평균 거리가 조절되어 진동 진폭 또는 진동 주파수를 일정하게 유지시키게 된다. 각 (x,y) 좌표 점에서의 탐침과 샘플간의 거리를 측정하여 스캐닝 소프트웨어는 샘플 표면에 대한 토포그래피 이미지를 생성하게 된다. 비접촉 모드에서는 접촉 모드에서 스캔 후에 상당하게 자주 발견되는 팁 또는 샘플의 파손 현상이 없다. 이것은 비접촉 모드의 AFM 이 부드러운 샘플, 예를 들면 생물 또는 유기체박막과 같은 샘플을 측정하는 데에는 접촉 모드보다 유리하다는 것을 보여준다. 강체 샘플에 대하여서는 접촉이든 비접촉 모드든 같은 이미지로 보일 것이다. 그러나, 강체 샘플 표면에 흡착 유체 단층의 경우, 촬영된 이미지들은 서로
다르게 보일 것이다.
비접촉 모드 *** 동적 모드의 작동에는 위상 동기 루프 (phase-locked loop) 가 캔틸레버의 공진 주파수를 추적하는 데 사용되는 주파수 변조 (frequency modulation) 와 서보 루프 (servo loop) 를 사용하여 캔틸레버를 특정 진폭에 여기 (excitation) 시키는 진폭 변조 (많이 사용됨)가 있다. 주파수 변조로, 진동 주파수의 변화에 의하여 팁-샘플간 상호작용에 대한 정보가 제공된다. 주파수는 매우 민감하게 측정되므로 주파수 변조모드는 강성 캔틸레버에도 적용될 수 있다. 강성 캔틸레버는 표면과 매우 가까운 안정한 특성을 제공하므로 결과적으로 이 테크닉은 초기의 AFM 기술로 하여금 극초진공 조건에서 실제적인 원자 단위의 분해능이 가능하도록 하였다. 진폭 변조로, 진동 진폭 또는 위상의 변화에 의하여 이미징에 대한 피드백 신호가 제공된다.
진동 위상 변화로 샘플 표면에 대한 물질 유형이 구별된다. 진폭 변조는 비접촉 또는 간헐적인
접촉 모드 다 쓸 수가 있다. 동정 접촉 모드에서는 캔틸레버 팀과 샘플 표면간 거리가 변조되도록 캔틸레버가
진동된다.
- 접촉 모드는 정적 모드로도 불리우며,
- 태핑 모드는 간헐식 접촉 모드,
AC 모드, 진동 모드 혹은 탐지 메카니즘에 의하여
진폭 변조 AFM 으로도
불리운다.
- 비접촉 모드는 탐지 메카니즘에 의하여 주파수 변조 AFM 이라고도 한다.

-
read more
MEMS 설계 서비스
Date2019.06.25 By운영자 Views45942 -
read more
금 나노 입자의 개요
Date2017.02.28 By운영자 Views409201 -
Read More
원자힘 현미경 의 개요 (AFM)
Date2016.01.15 By운영자 Views102563 -
Read More
나노 또는 MEMS 파운드리 서비스
Date2015.12.11 By운영자 Views78073 -
Read More
(트리즈) 모순을 극복한 이상 해결책
Date2014.05.09 By운영자 Views90699 -
Read More
MEMS 기술 개발 서비스 개요.
Date2014.05.08 By운영자 Views95734 -
Read More
다구찌 실험 계획법 소개
Date2014.04.29 By운영자 Views103231 -
Read More
MEMS 자이로스코프와 MEMS 가속도계 (Invensense 사의 6축 자이로스코프/가속도 센서)
Date2013.12.31 By운영자 Views98006 -
Read More
MEMS (마이크로전기기계장치)
Date2013.11.13 By운영자 Views86150
Designed by sketchbooks.co.kr / sketchbook5 board skin
Sketchbook5, 스케치북5
Sketchbook5, 스케치북5
Sketchbook5, 스케치북5
Sketchbook5, 스케치북5

